| Wer mit
Röhren arbeitet braucht Trafos und Trafos sind nicht unbedingt
billig. Also reifte schon vor Jahren der Wunsch nach einer eigenen Trafowickelmaschine. Das Gebrauchtmaschinen Angebot ist sehr überschaubar und sehr hochpreisig. Also selbst ist der Mann. Die erste Konstruktion wurde schnell wieder zerlegt weil sie nix taugte. Einzig der Motor blieb erhalten. Es ist ein Weichenmotor aus einer Rohrpostanlage. Nicht schnell aber sehr kräftig. Eine kleinen Film von der Maschine bei der Arbeit gibt es hier : Video 12Mb Ich habe ordentlich viele Bilder gemacht und werde sie nachfolgend kommentieren. Mechanik ist die eine Seite des Projektes aber ohne Elektronik geht es nicht. Bei den historischen Trafowickelmaschinen war fast alles mechanisch gelöst, elektrisch war nur der Motor :-). Mit modernen µProzessoren haben wir es heute leichter komplexe mechanische Abläufe zu steuern. Das Netzteil Aus Störsicherheitsgründen habe ich für den Leistungs und den Logik Teil zwei getrennte Stromversorgungen auf gebaut. Der Logikteil wird aus einer 9V Wicklung versorgt und der Wickelmotor, Schrittmotor und die LCD Hintergrung Beleuchtung aus einer 12V Wicklung. Das ergibt optimale Verhältnisse und größt möglichen Störabstand. Der Leistungsteil wird ungeregelt versorgt die Logik über einen Längsregler. Der Trafo ist ein 12V Ringkern aus der Halogentechnik auf den händisch die 9V aufgebracht wurde (siehe Bilder). Die Lineareinheit Die Lineareinheit für den Drahtleger besteht aus einem Schrittmotor, M6 Gewindestange, Linearlager mit 6mm Stange und 2 Endschaltern. Der Schrittmotor wird von einer L297/L298 Schrittmotor Endstufe angesteuert. Diese Endstufe ist direkt an den Steuerungsrechner angeschloßen. Der Steuerungsrechner steuert den Vorschub des Drahtlegers in Abhängigkeit von der Drahtstärke. Dieser Paramter kann per Infrarot Fernbedienung in der Steuerung eingestellt werden. Die beiden Endschalter legen die Umschaltpunkt für den Richtungswechsel des Drahtlegers fest. Bei Anschlag wird die Drehrichtung des Schrittmotors automatisch geändert. Die Steuerung Die Steuerung besteht aus den beiden Netzteilen , einem LCD Display, Lichtschranke, µProzessor, Schrittmotor Interface, Infrarot Empfänger und der Fussschalter Steuerung. Alle Parameter die zum Betrieb des Wickelprozesses notwendig sind können über einen Infrarot Fernbedienung eingeben werde. Das ersparte den Bau einer Tastatur. Das LCD Display zeigt alle eingestellten Parameter und den momentanen Stand des Wickelvorganges. Die Elektronik mit dem Komparator dient dazu das Signal das von der Reflexlichtschranke kommt aufzubereiten. Die Reflexlichtschranke zählt die Anzahl der Wicklungen. Nicht nur mit der Fernbedienung kann der Wickelvorgang gestartet werden sondern auch mit einem Fussschalter. Somit hat man(n) beide Hände frei. Das Schrittmotor Interface steuert den Schrittmotor in Abhängigkeit der eingestellten Drahtstärke an. Die Anzahl der Schritte wird vom µProz berechnet. Die Software ist komplett in BASCOM geschrieben . Sie ist aber so groß ds man leider die lizensierte Version von BASCOM benötigt. Deshalb veröffentliche ich sie nicht. Funktionen der IR Fernbedienung Als Steuerungscode kommt das Philips RC5 Protokoll zum Einsatz. Es kann jede Universalfernbedienung eingesetzt werden. Einfach ein älteres Philips Gerät einstellen. Im folgenden die Tastenbelegung der Fernbedienung und ihre Funktion:
 |
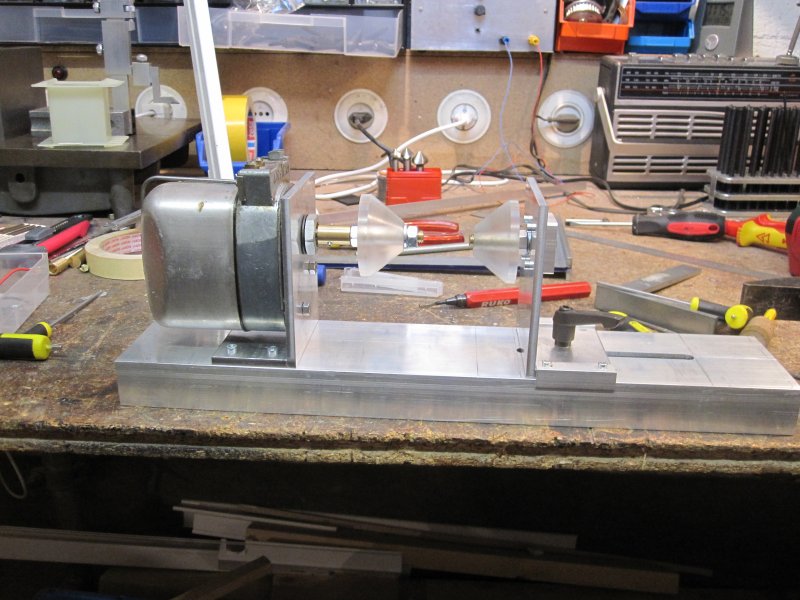
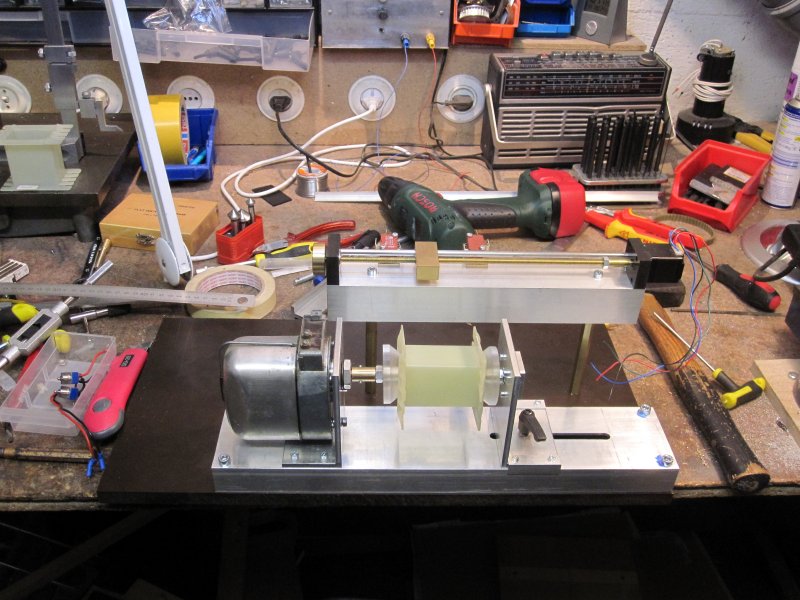
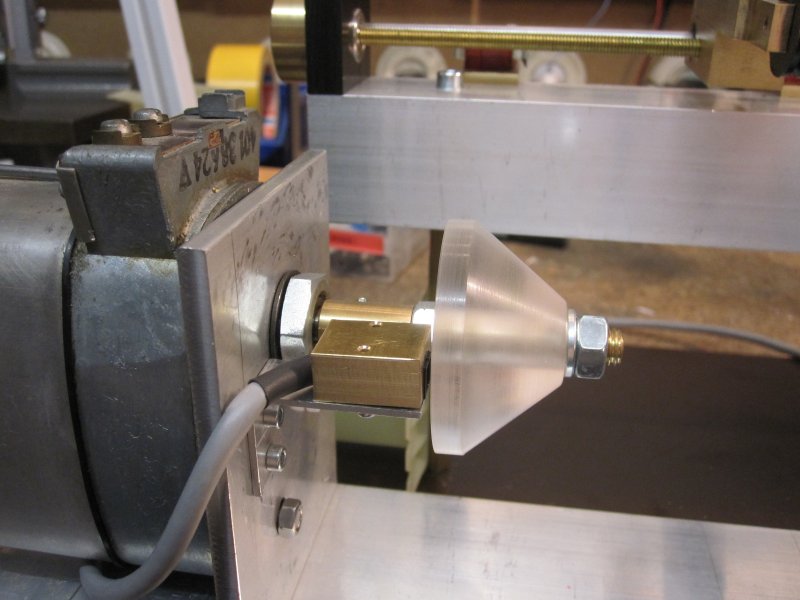
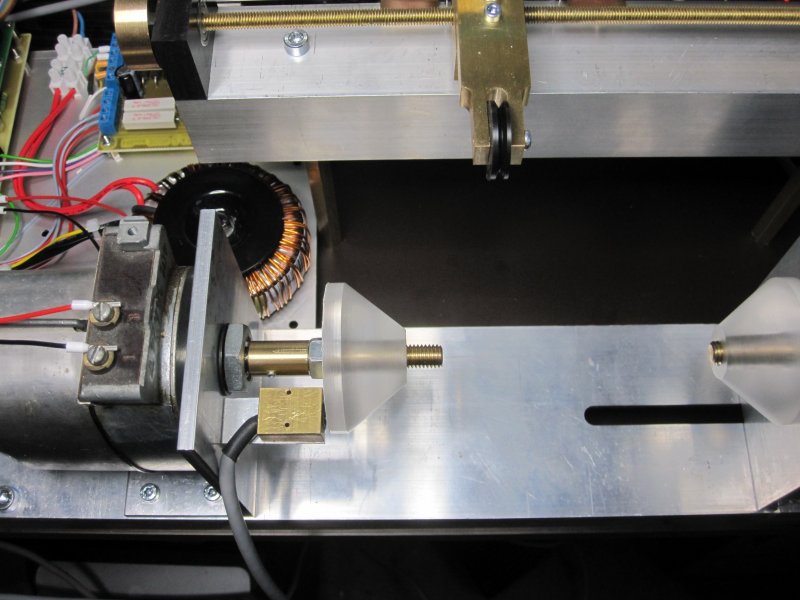
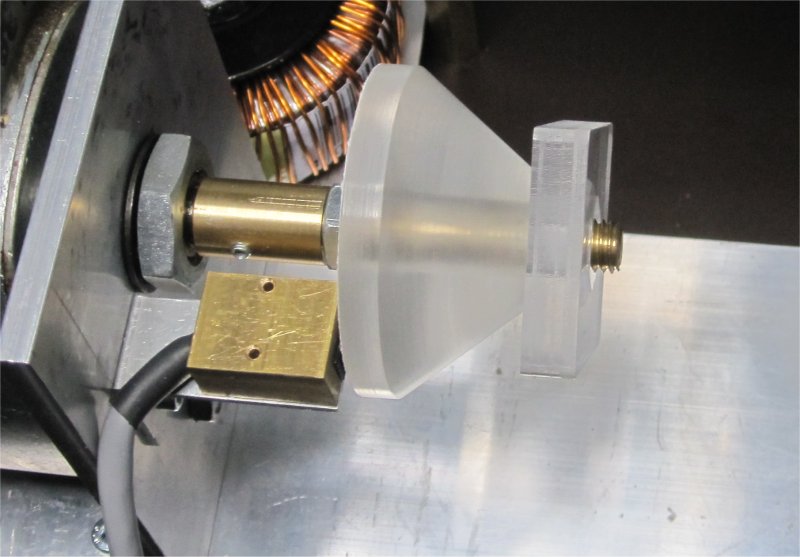
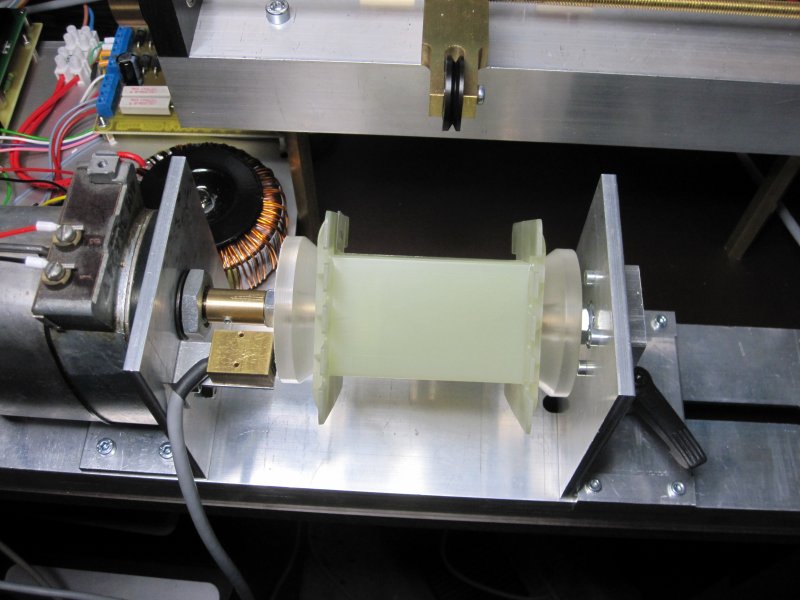
Der Wickelmotor mit den beiden Aufnahmekegeln und einem M102 Kern für die Maßaufnahme
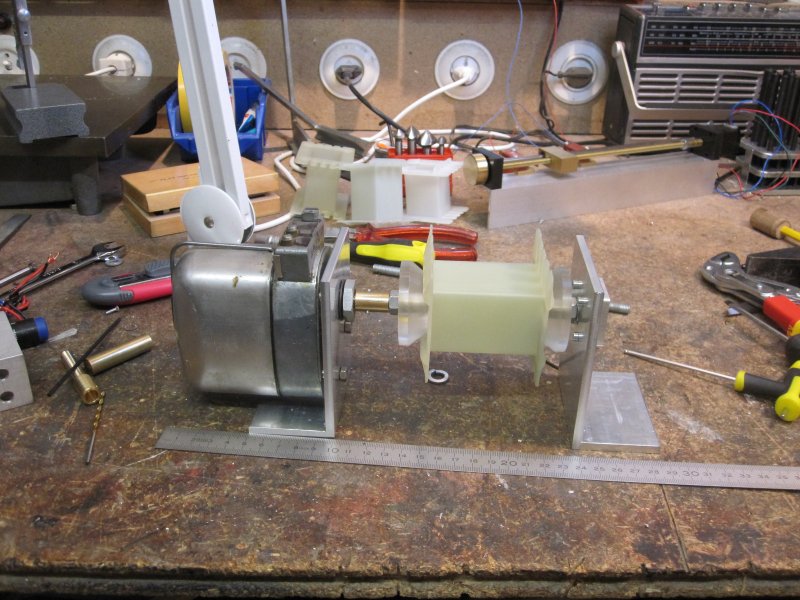
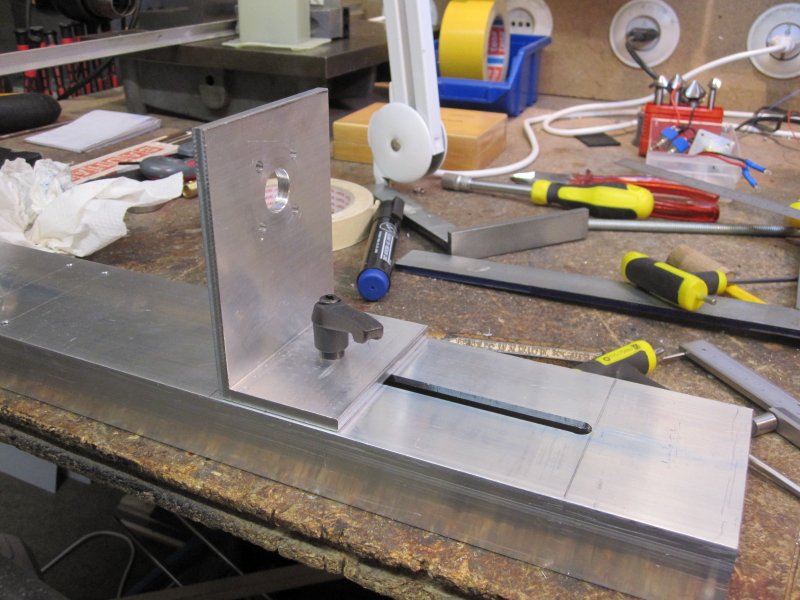
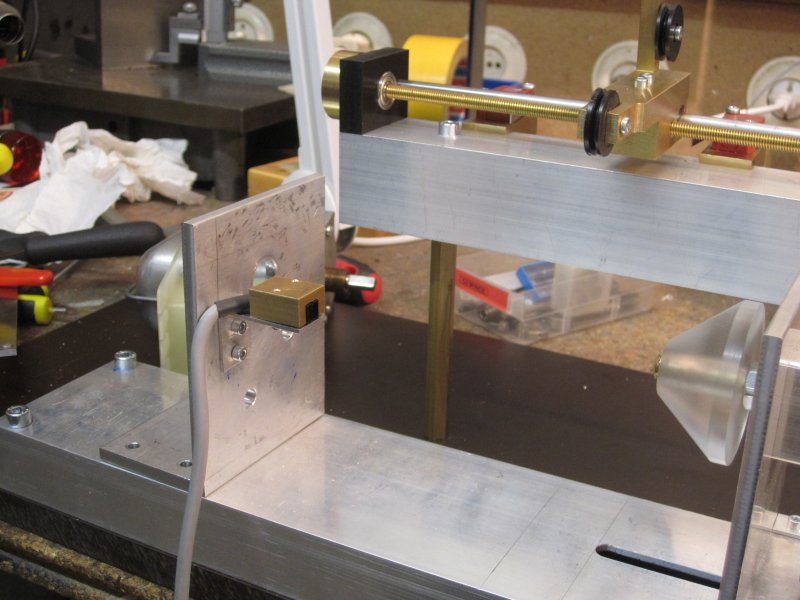
Baugruppen zueinander ausrichten
U-Schiene zu Montage der Motorhalterung und des Gegenlagers
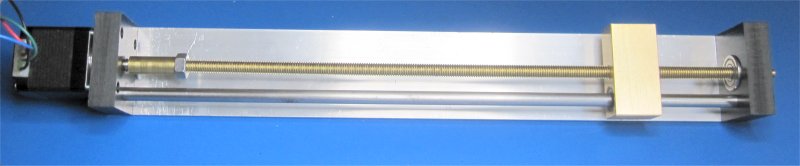
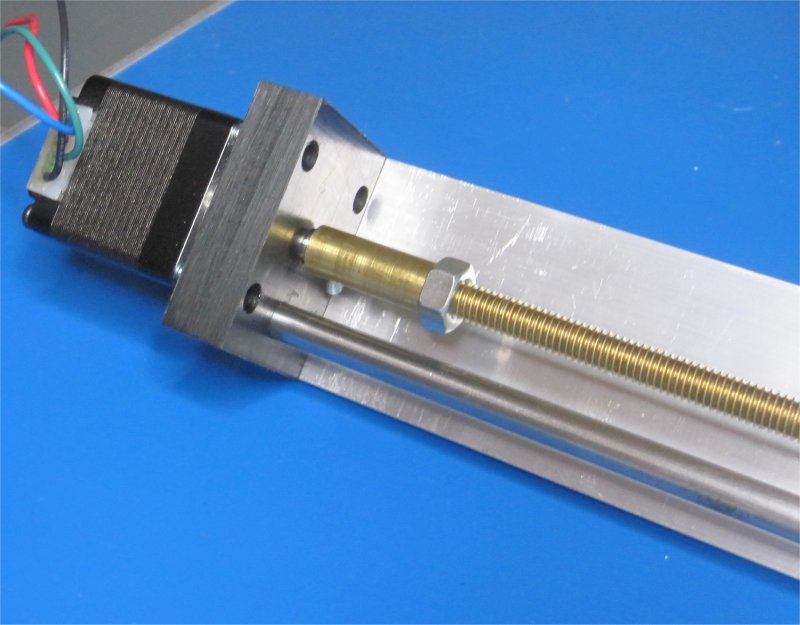
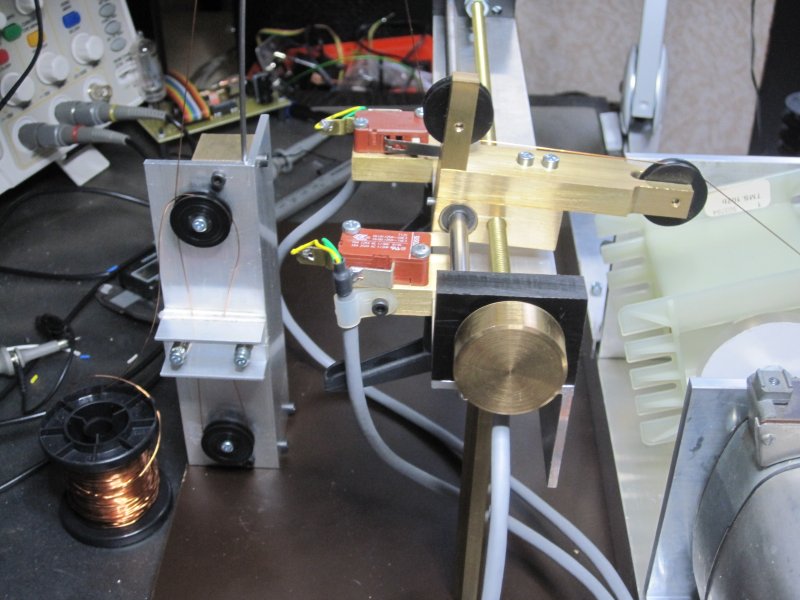
Die Lineareinheit mit Schrittmotor
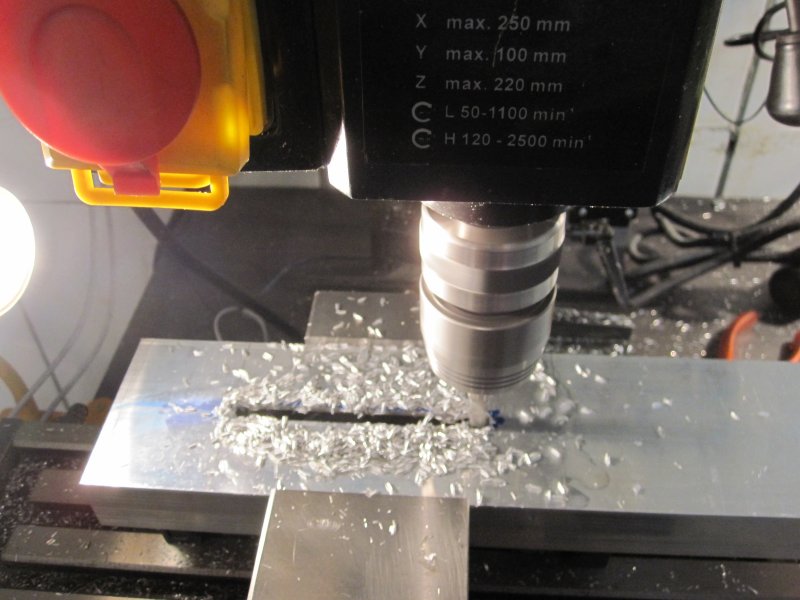
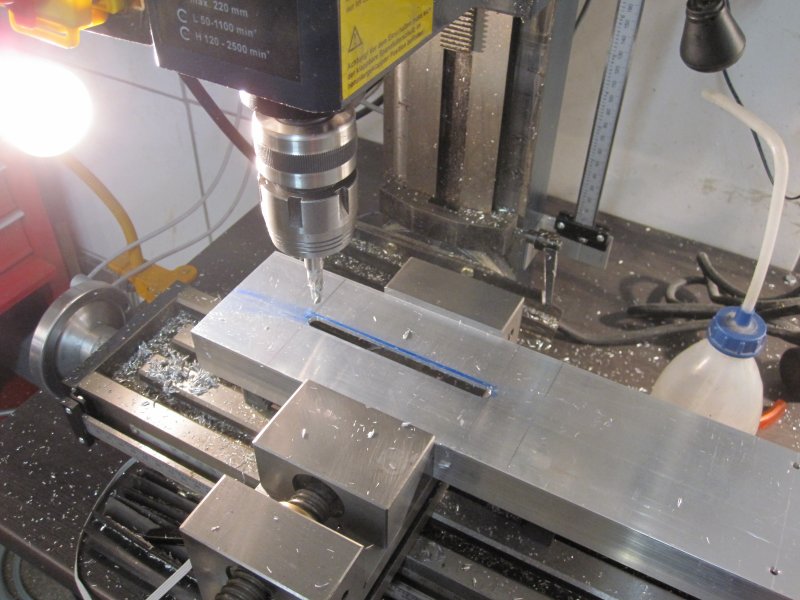
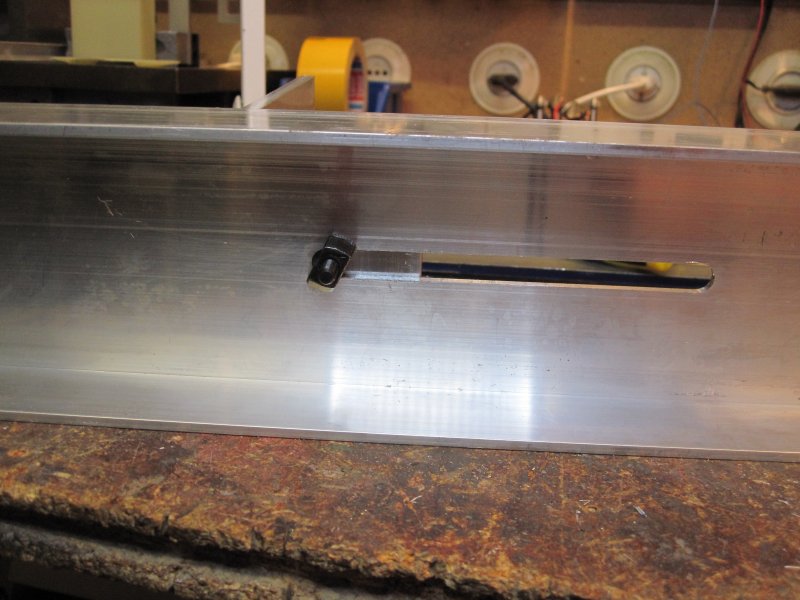
Fräsen des Verstellschlitzes für das Gegenlager
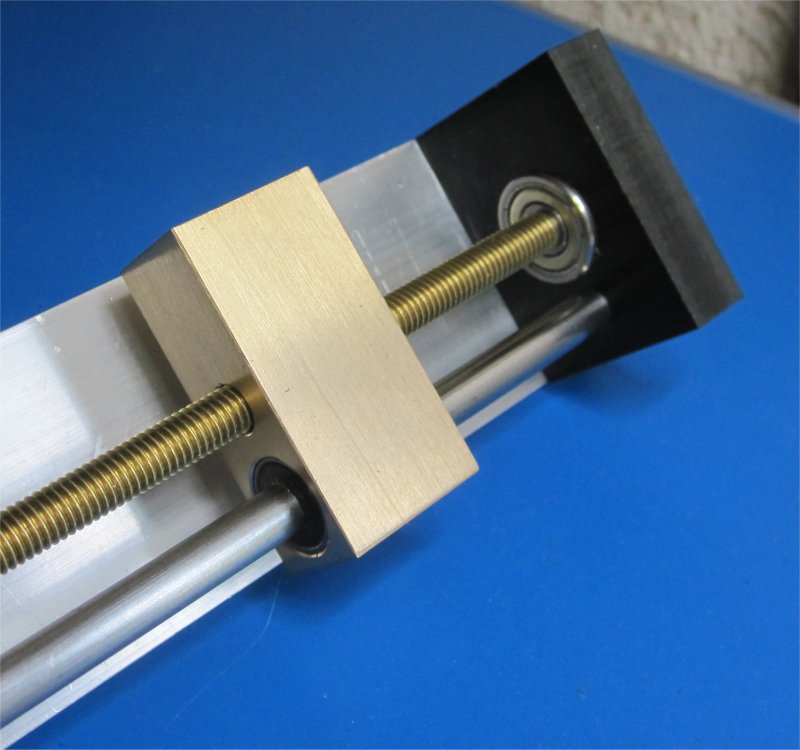
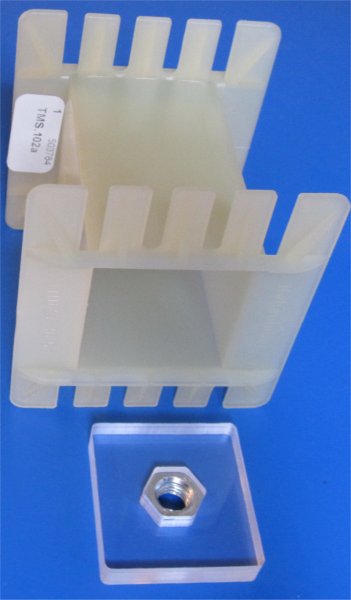
Gegenhalter von unten und mit Boschprofilmutter. Die dreht sich von selbst in die richtige Richtung
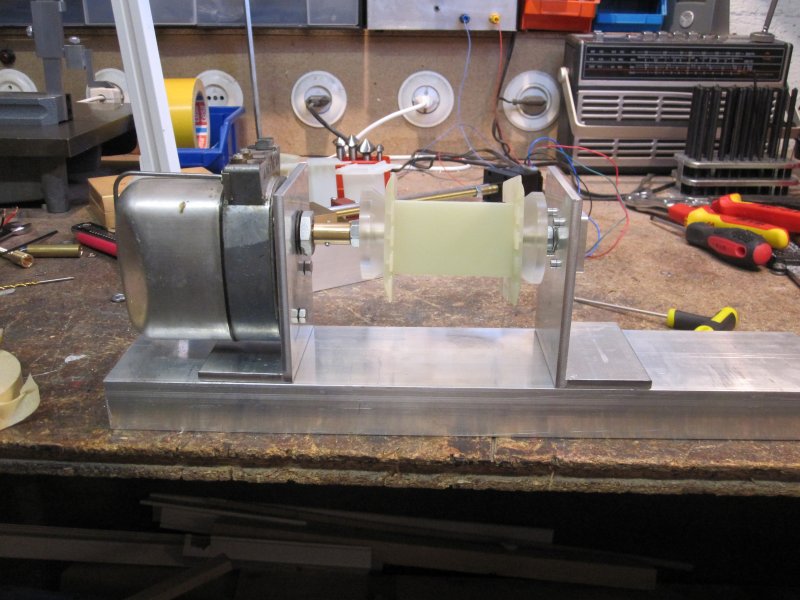
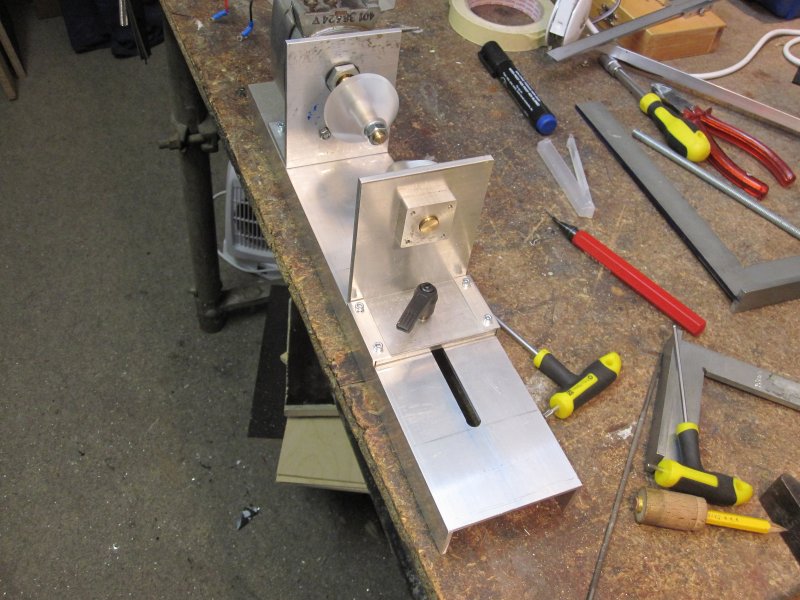
Erste Anprobe, passt!!
Grundplatte 15mm Pertinax das hält
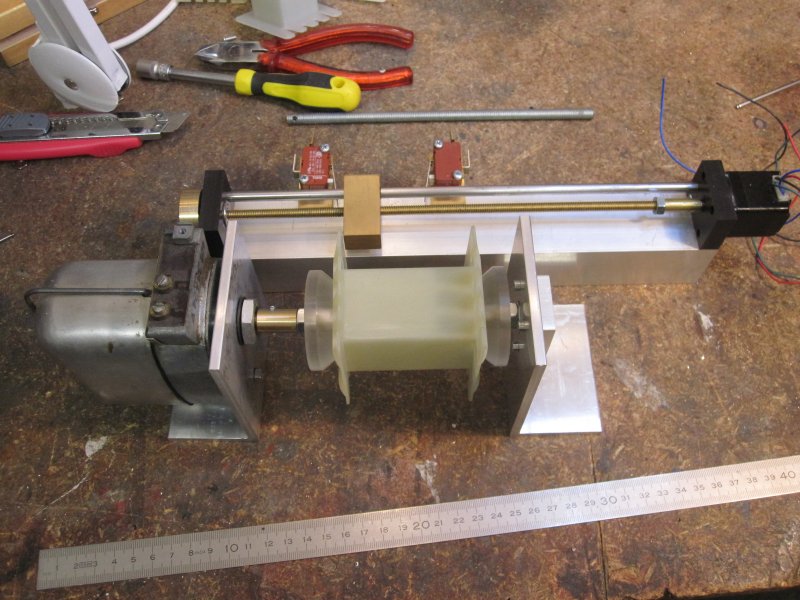
Nächste Baugruppe montiert
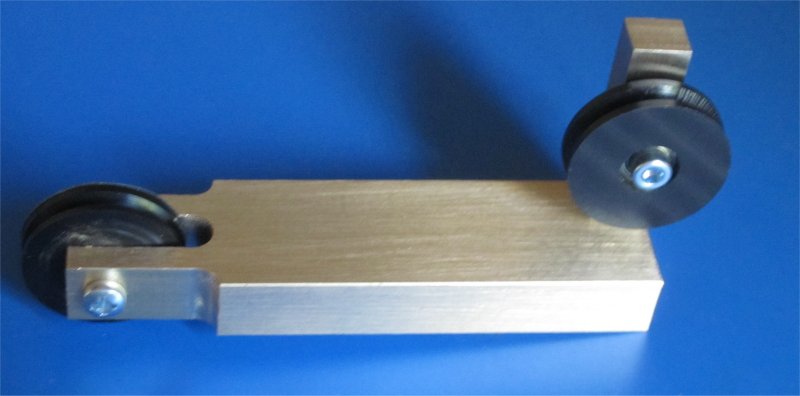
Der Drahtleger
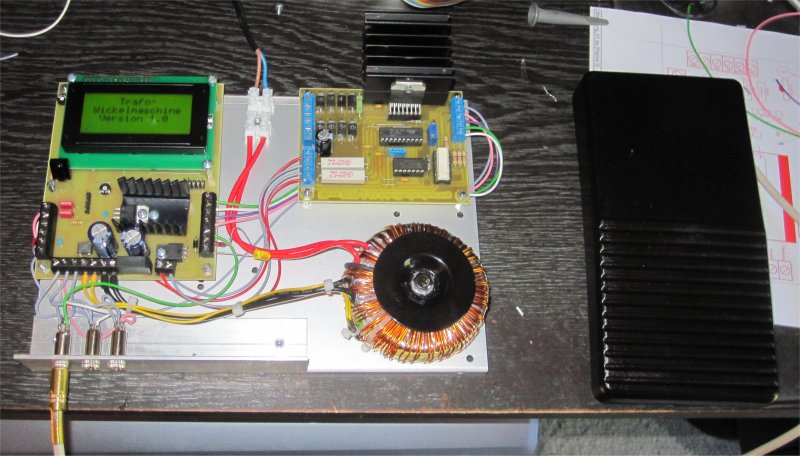
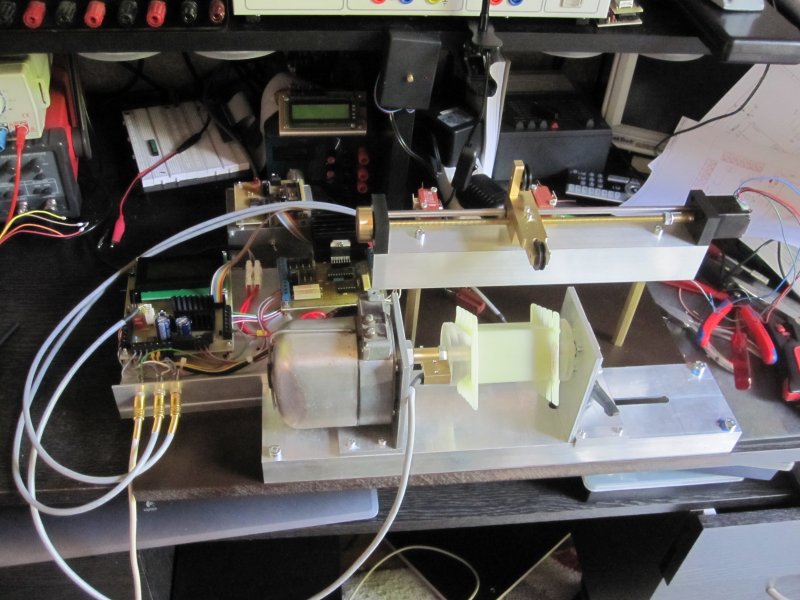
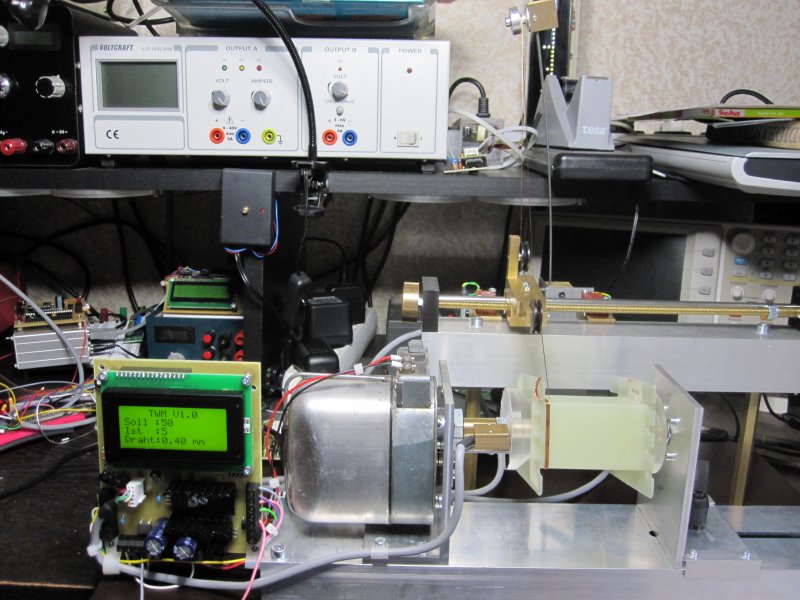
Ohne Elektronik bewegt sich nichts der Versuchsaufbau
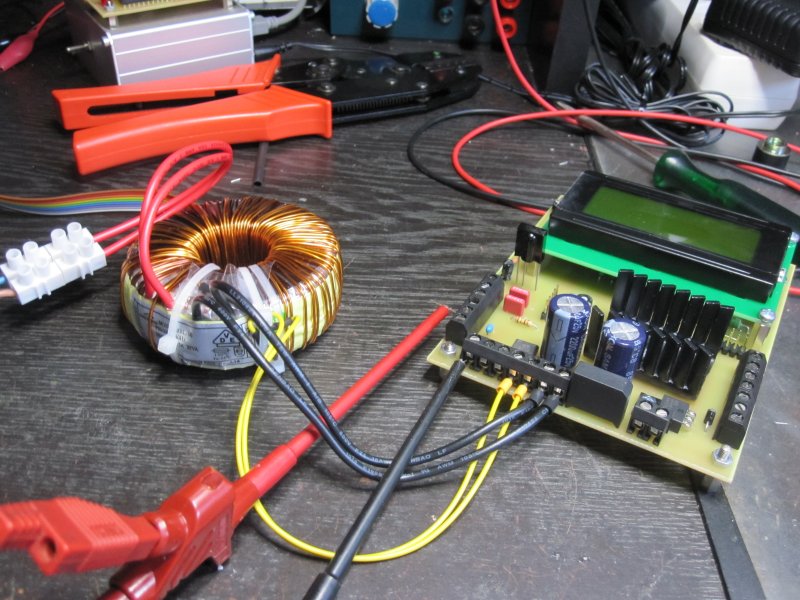
Die Stromversorgung 12V/2A und nach Modifikation auch 9V/500mA

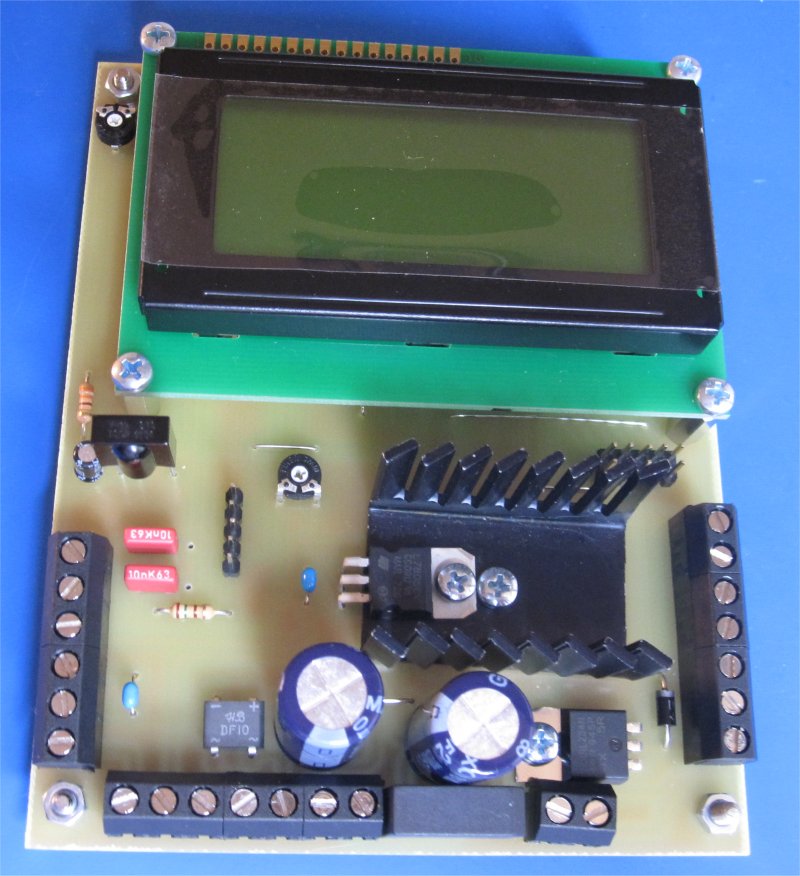
Steuerung,Schrittmotoransteuerung, Fussschalter
Windungszähler Sensoreinheit
Drahtverhau zum Software testen
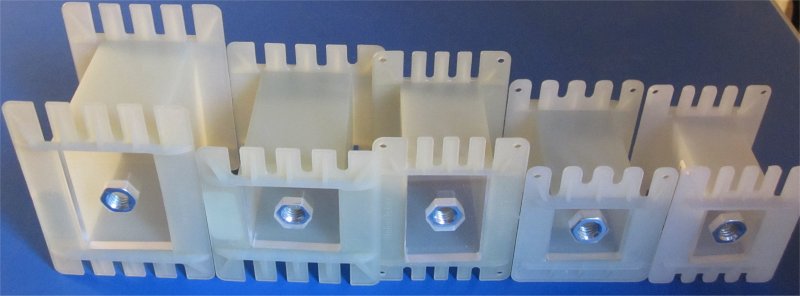
Die Verdrehsicherung für die Kerne
Die Drahtzugbremse ein hartes Stück Arbeit
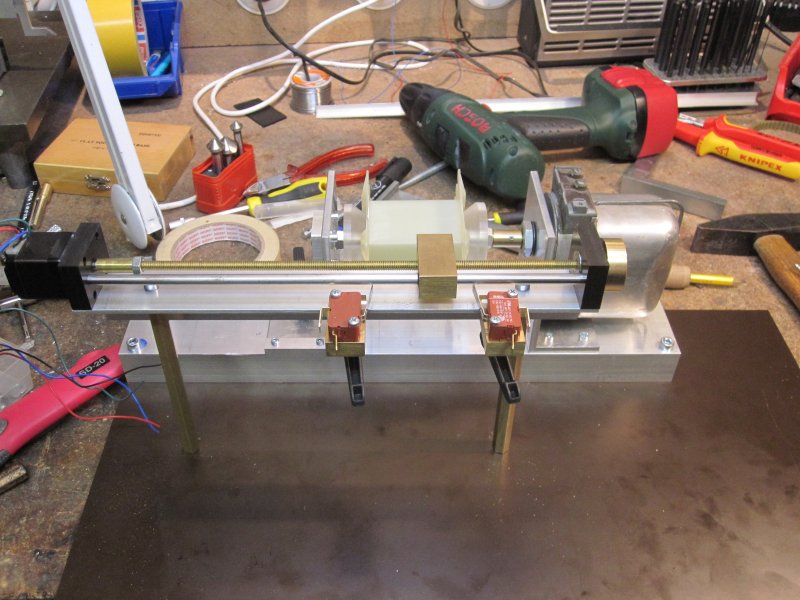
Etwas aufgeräumterer Aufbau
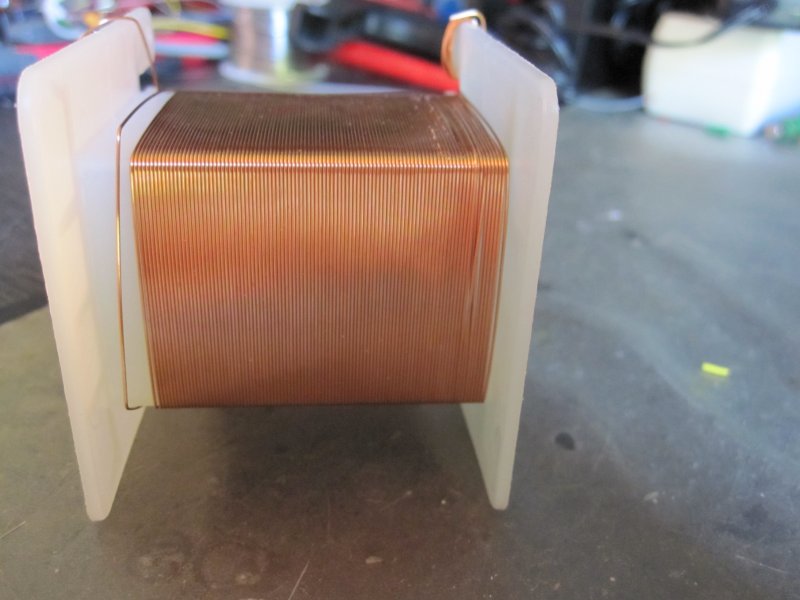
Testwicklung sieht doch sauber aus
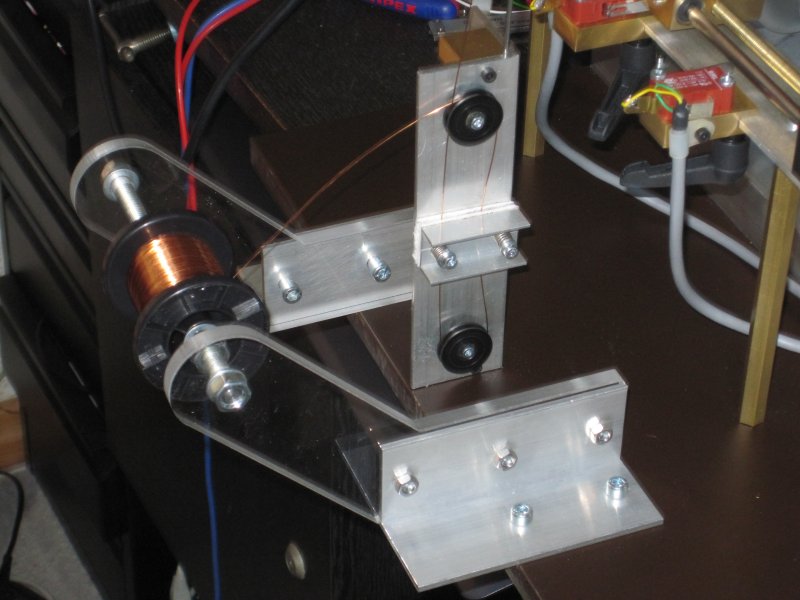
Drahtrollen Halterung
Das war's :-)